First evaluation of postural synergies in connection to motor neuron synergies for myoelectric prosthetic control
Patricia Capsi Morales (from IIT) developed a framework at ICL during her PhD studies for the control of a multi-synergistic hand through neuroscientific principles with the purpose of a true bionic integration. This is the first time where postural synergies are connected to motor neuron synergies and she evaluated their potential for myoelectric control as a future alternative with applications in prosthetics and rehabilitation robotics.
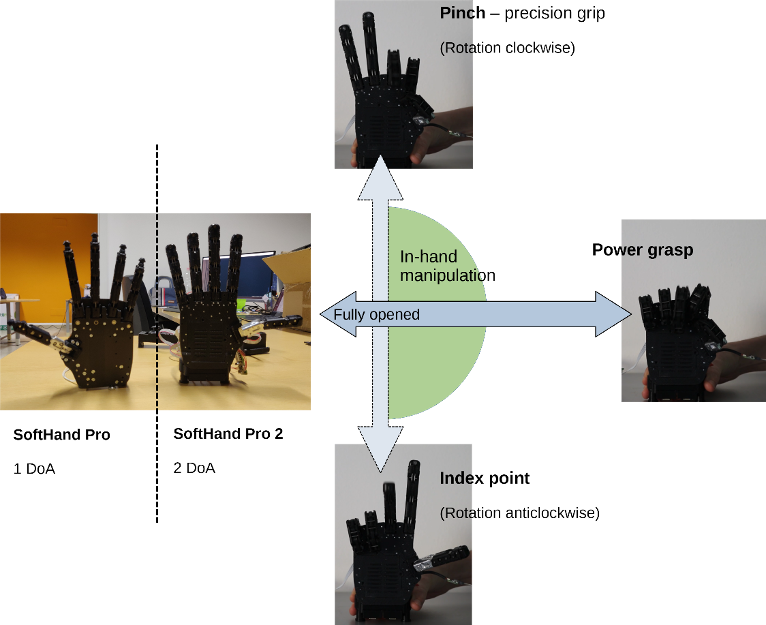
First of all, she developed a prosthetic version of a multi-synergistic hand that presents two synergies (see Figure 1), and it is capable of reproducing continuous movement of all fingers in opposite directions. Apart from providing the user with additional grasp patterns, this hand could theoretically yield in-hand manipulation of objects, a very novel feature in soft prosthetics.
Postural synergies simplify the complexity of hands while preserving a high level of dexterity, whereas muscular and neuronal synergies led to improvements in the intuitiveness and functionality of myoelectric control. During her period abroad at ICL under the supervision of Prof. Farina, she proposed an alternative myoelectric control strategy based on the functional organization of motor units and neuronal synergistic information of the hand. We hypothesize that this methodology presents higher dimensionality and better specificity than other alternatives, such as muscle synergies control. Moreover, this control method may not only be adequate to command a synergistic prosthetic hand, but the integration of both structural and computational synergies contributes to the creation of a framework to further develop on the existence of modules (i.e. synergies) in upper-limb motion control and its potential for assistive and rehabilitative robotics. A journal publication is being prepared with the results from an offline analysis with 9 able-bodied subjects, an online experiment of the proposed method with able-bodied subjects, and a preliminary validation and insights from the experience of a prosthesis user.
Additional publications (funded by NBS)
International Journals
[1] Capsi-Morales, P., Piazza, C., Catalano, M. G., Grioli, G., Schiavon, L., Fiaschi, E., & Bicchi, A. (2021). Comparison between rigid and soft poly-articulated prosthetic hands in non-expert myo-electric users shows advantages of soft robotics. Scientific reports, 11(1), 1-15.